Requisiti
Per utilizzare il SofMotion di CODESYS è necessario che il Runtime supporti le librerie Softmotion PLC e che questo sia di tipo Real Time. Ad esempio, possiamo utilizzare: Control RTE per Windows, Control Linux SL oppure Runtime custom.
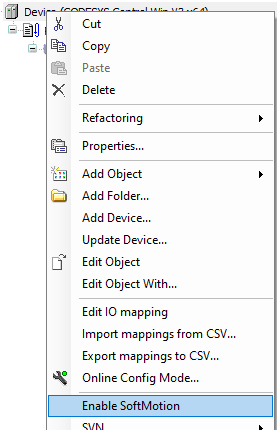
L’attivazione o disattivazione del SoftMotion può essere eseguita direttamente sul Device principale con il comando Enable/Disable SoftMotion:
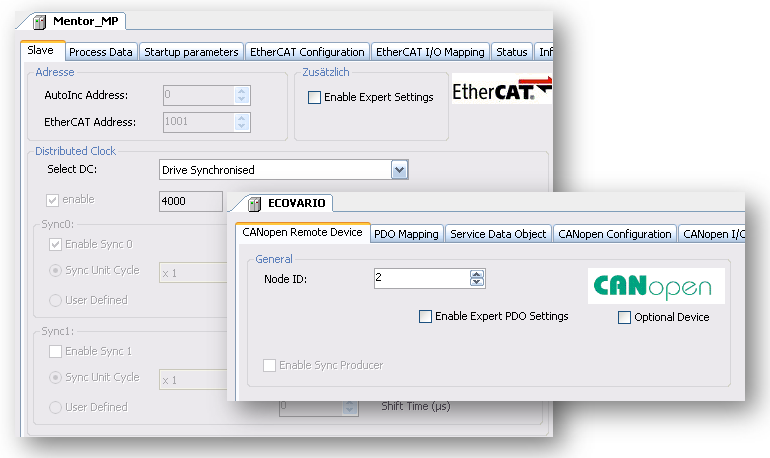
Il SoftMotion di CODESYS è supportato dai Bus di campo EtherCAT o CanOpen.
Per poter usufruire del funzionamento del SoftMotion, è necessario acquistare la licenza adatta ai propri scopi. Senza licenza le librerie SoftMotion funzionano in demo mode per 30 minuti.
Informazioni generali
Le librerie CODESYS SoftMotion sono basate sull’organizzazione indipendente chiamata PLCOpen. Le librerie CODESYS SoftMotion si compongono di blocchi funzionali atti alla gestione del movimento; questi blocchi funzionali possono essere di due tipologie:
- MC_NomeBloccoFunzione: Tutti i blocchi funzionali che iniziano con “MC_” rispettano le specifiche dettate da PLCOpen.
- SMC_NomeBloccoFunzionale: Tutti i blocchi funzionali che iniziano con “SMC_” sono implementazioni custom da parte di CODESYS.
Controllo di posizione nel Drive: la maggior parte delle soluzioni, che utilizzano il SoftMotion, si avvale del modo operativo CSP (Mode of operation 8); il PLC invia i set di posizione e velocità utilizzando il Cycle task del bus di campo utilizzato (approssimativamente 1-10ms).
Il loop di posizione (close loop) è in carico al Drive con tempi decisamente migliori (100-250us).
I valori attuali di posizione e velocità vengono trasferiti dal Drive al PLC solo per monitorare o visualizzare (Visu).
Controllo di posizione nel PLC: una soluzione meno tipica è la possibilità di gestire il loop di posizione dal PLC. I set di posizione e velocità vengono calcolati attraverso i function block del SoftMotion ciclicamente (approssimativamente 1-10ms). Il PLC invia il set di velocità mentre il Drive manda al PLC la posizione attuale, la quale viene utilizzata per chiudere l’anello.
Cosa troviamo nel Library Manager abilitando il SoftMotion
Librerie del SoftMotion:
- SM3_Basic
- SM3_CNC
- SM3_Robotics
Librerie per i Bus di Campo:
- SM3_Drive_CAN
- SM3_Drive_ETC
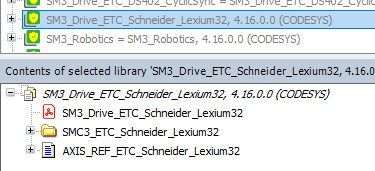
Librerie specifiche al Drive (Drive certificata da CODESYS):
- SM3_Drive_CAN_<xy>.library
- SM3_Drive_ETC_<xy>.library

Drive Interface
La maggior parte dei costruttori di Drive ha certificato la Drive Interface (Function Block AXIS_REF definito nella libreria SM3_Basic) con il team SoftMotion di CODESYS. Questo permette di poter cambiare il tipo di Drive senza cambiare il codice.
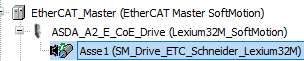
Aggiungendo questo Drive viene aggiunta automaticamente la libreria SM3_Drive_ETC_XXX customizzata:
Con Drive che non hanno la Drive Interface certificata è possibile aggiungere la Drive Interface standard (SoftMotion CiA402 Axis):
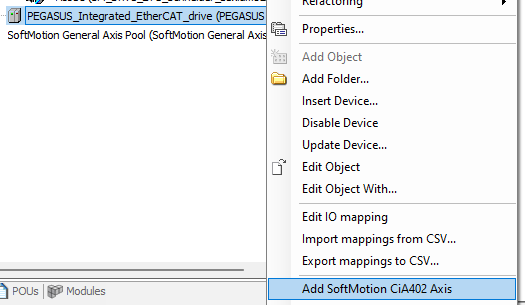
in questo caso CODESYS non assicura il funzionamento completo del Drive nei confronti delle librerie SoftMotion perchè il Drive non è certificato/testato.
Lascia un commento